| Secciones |
|---|
|
|
| Foros Electrónica |
| Alguien dijo ... |
| La historia se está convirtiendo cada vez más en una carrera entre educación y catástrofe. Herbert George Wells(1866-1946). Escritor y filósofo político inglés. |
| Contacto |
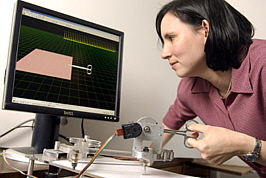
| Las herramientas roboticas para cirugia, ahora poseen el sentido del tacto | ||||||||||
Las herramientas robóticas ofrecen a los cirujanos un buen modo de realizar intervenciones quirúrgicas con gran precisión en espacios pequeños. Pero cuando el cirujano dirige estas herramientas desde la consola de un ordenador, pierde un componente importante: el sentido del tacto. Ahora, unos investigadores intentan cambiar esta situación agregando esas sensaciones. La tecnología que han desarrollado permitirá a los médicos "sentir" el trabajo de su auxiliar mecánico. (NC&T)"Los cirujanos han pedido este tipo de feedback", señala Allison Okamura (profesora de ingeniería mecánica en la Universidad Johns Hopkins, e investigadora destacada en las interacciones hombre-máquina). "Estamos aplicando nuestros conocimientos sobre la tecnología háptica para intentar devolver a los cirujanos el sentido del tacto que pierden cuando utilizan las herramientas médicas robóticas". El sentido del tacto es importante para los cirujanos. Les gusta tener una percepción táctil directa de lo que está sucediendo dentro del cuerpo mientras operan. Ellos sienten el "reventón" cuando una aguja pasa a través del tejido. Con el tacto, pueden buscar y localizar las calcificaciones. Este sentido les ayuda a orientarse dentro del cuerpo. En las intervenciones robóticas y en otros tipos de cirugías poco invasivas, los cirujanos insertan largas herramientas entre sus manos y el paciente. Este enfoque tiene beneficios médicos claros, pero para el cirujano hay una pérdida de destreza y de información háptica (táctil). Por ejemplo, estas herramientas pueden dirigirse para realizar las suturas, pero si el operador hace que las herramientas tiren demasiado fuerte, el hilo puede romperse.
| ||||||||||
Viernes, 05 Enero, 2007 - 12:00 | ||||||||||
 | ||||||||||